產(chǎn)品分類
產(chǎn)品分類
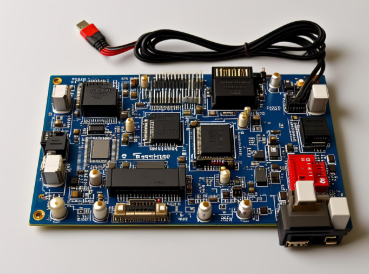
磁軸承控制器
磁軸承控制器
相關(guān)文章 : 0篇
瀏覽 : 次
磁懸浮飛輪是對衛(wèi)星等航天器進行高精度姿態(tài)控制的執(zhí)行機構(gòu),為了提高空間用磁懸浮飛輪控制系統(tǒng)的可靠性和靈活性,對基于FPGA的磁軸承數(shù)字控制器進行研究.首先,對磁軸承系統(tǒng)進行建模,并選擇合適的控制策略;利用片上軟硬件協(xié)同設(shè)計的思想,提出了一種基于FPGA和LEON3處理器軟核的磁軸承數(shù)字控制器.然后,搭建了實驗系統(tǒng)測試系統(tǒng)的實際性能.最后,提出了一種基于FPGA的自修復(fù)磁軸承控制器.基于FPGA的磁軸承控制器相對基于DSP+FPGA的控制器失效率降低了10%,控制板面積減小30%.實驗結(jié)果表明,在基于FPGA的磁軸承控制器控制下,在磁懸浮飛輪工作轉(zhuǎn)速范圍內(nèi),飛輪轉(zhuǎn)子跳動量〈20μm,力矩輸出誤差〈4×10-3N.m,正反轉(zhuǎn)不一致性〈10%,達到了較高的控制精度.
推薦產(chǎn)品

列表欄目
















 2012- 2022 拍明芯城ICZOOM.com 版權(quán)所有 客服熱線:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版權(quán)所有 客服熱線:400-693-8369 (9:00-18:00)